Development of an autonomous rover
for exploration and scientific investigation
in Antarctica
Siena, June 1999
Contents
1 Aims of the project
2 Research group
3 External collaborators
4 Students
5 Research activity
in 1998-1999
5.1
Mechanical design of the rover base
5.2
Rover localization through GPS
6 PNRA'99
6.1
Rationale
6.2
Research design
6.3
Objectives
6.4
Methodology
6.5
International cooperations
7 Bibliography
7.1
Robust estimation and filtering: theory and algorithms
7.2
Autonomous mobile robot navigation
7.3
Control of robotic manipulators
7.4
Dynamic vision
7.5
Meteorites
1 Aims
of the project
This project deals with the exploration of Antarctica
by means of autonomous rovers. The exploration of the plateau can be made
by a single rover or a team of rovers. The typical scenario of an autonomous
exploration is as follows: an autonomous rover cooperates in exploring
the surface using their sensor devices with other rovers or with the base.
A map is incrementally built, and measures of data reliability are associated
with it. The map is dynamically updated through optimization procedures.
Once the confidence intervals of data are satisfactory, it is possible
to place landmarks on the ground and to collect meteorites samples with
coring procedures. The rover must be able to work in a safe mode: it should
be able to detect crevasses and other obstacles, e.g. ice hills, by means
of sensors. Two possible scenarios are taken into account. In the first
one, the mobile robot executes its tasks in the neighborhood of the base
camp within the range of some kilometers. In the second configuration,
the mobile robot cooperates with other rovers to perform its tasks.
This is a joint work of the Dipartimento di Ingegneria
dell'Informazione and of the Dipartimento di Scienze della Terra of Università
degli studi di Siena.
2 Research group
| Antonio Vicino |
vicino@ing.unisi.it |
| Marcello Mellini |
mellini@unisi.it |
| Andrea Garulli |
garulli@ing.unisi.it |
| Domenico Prattichizzo |
prattichizzo@ing.unisi.it |
| Antonio Zeoli |
zeoli@mna.unisi.it |
| Graziano Chesi |
chesi@ing.unisi.it |
| Mauro di Marco |
dimarco@control.dsi.unifi.it |
| Alessandro Francini |
francini@sunto.ing.unisi.it |
| Andrea Gorelli |
gorelli@sunto.ing.unisi.it |
| Andrea Mariotti |
mariotti@sunto.ing.unisi.it |
3 External collaborators
| Antonio Bicchi |
bicchi@ing.unipi.it |
www.piaggio.ccii.unipi.it |
| Paolo Caviglia |
pacavigl@vislink.it |
www.sistecgps.com |
| Roberto Cipolla |
cipolla@eng.cam.ac.uk |
svr-www.eng.cam.ac.uk/research/vision |
| Simon Lacroix |
Simon.Lacroix@laas.fr |
www.laas.fr |
4 Students
| Annalisa Cavallini |
| Giulio Putti |
| Serena Paolini |
| Massimo Pasqualetti |
| Elena Peccianti |
5 Research activity
in 1998-1999
5.1 Mechanical design
of the rover base
The base of the autonomous rover has been designed
modifying the mechanics of the base of the snowmobile ski-doo by Bombardier
Inc., cf. fig. 1.

Figure 1: Snowmobile SKI-DOO
The vehicle consists of a 2m. x 1m. rectangular
base mounted on two differentially driven tracks. Its design sketch is
reported in fig. 2.
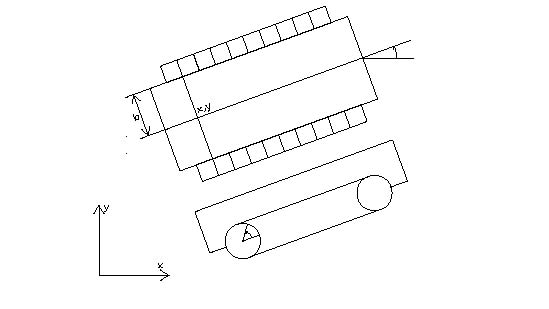
Figure 2: Track-based configuration of the rover.
The base of the rover is under construction. Mechanical
details of the two tracks are reported in fig. 3
and fig. 4. Both tracks are powered by independent
DC motors.

Figure 3: Rover base.

Figure 4: Rover Base (lateral view).
Placed upon the base of the rover there will be
the control unit, the data pre-processing unit, and the sensors (including
the visual system) necessary for navigation and detection of meteorites
and obstacles.
The platform will also pull a trailer with an
expected load of 200 Kg. The trailer will carry other sensors used for
detecting meteorites both on the surface (digital telecamera) and underground
(GPR: Ground Penetrating Radar, able to detect meteorites beneath the snow
up to a depth of several metres).
This track-based configuration of the rover was
chosen because of two factors:
-
simplicity in control and in driving, given the possibility
of changing direction with ease and of steering in a very limited space;
-
large surface contact with the ground, especially
useful for the icy stretches the vehicle will have to cross.
Each track encloses an undercarriage (fig. 5)
with a double function:
-
keeping the track at the proper tension by means
of a complex system of springs and gear-wheels;
-
building the suspension system needed to tackle even
the most uneven terrain without causing any damage to the vehicle itself
or to the instruments carried aboard.

Figure 5: Track detail
5.2 Rover localization
through GPS
This research deals with the use of GPS for the navigation
of a mobile robot, moving along a straight line (the x-direction). The
study of mobile robot navigation by means of GPS signals is jointly
carried out with the SISTEC GPS in Vado Ligure (SV) leaded by Dott. Paolo
Caviglia.
The sperimental hardware setup consists of a GPS
receiver "Zodiac Jupiter" by Rockwell, cf. fig. 6,

Figure 6: Inside view of the Rockwell Jupiter.
endowed with a passive and an active antenna and
a station for the differential correction in RTCM format. The difference
between the active and passive antennas is that the former, being amplified,
offers a greater gain compared to the passive antenna. The GPS receiver
with the active and passive antennas are reported in fig. 7.
Figure 7: GPS receiver with active and passive
antenna. The passive antenna is placed on the receiver.
The Rockwell Jupiter is connected to a PC (serial
port) which monitors data received. The two GPS receivers working in differential
configuration communicate by means of a radio link.
A C procedure running on the PC decodes the incoming
messages from the serial port, which are codified according to the Zodiac
Binary protocol. It implements a conversion from hexadecimal to decimal
to obtain intelligible data. The control law for mobile robot navigation
will be based on such data.
Each Zodiac binary message consists of a header
part and a data part with own checksum. Each input/output message starts
with a synchronization word. The second word in the header contains the
numeric message ID. The third word contains the word count for the data
part of the message. The fourth word is a 16-bit field allocated to protocol.
These flag bits control ACK/NACK requests and implement message logging
requests. Word five of the message header is the data checksum, used to
validate the header portion of the message. The data portion of the binary
message can be variable in length, as specified by the data word count
found in the header.
The goal of this research is to execute a navigation
experiment for the rover based on sensor information provided by the GPS.
The aim of the experiment is to test and validate the practicability of
GPS autonomous navigation on the anctartic plateau.
6 PNRA'99
This is the program of a research project for 1999-2001
submitted to the italian Progetto Nazionale Ricerche in Antartide.
6.1 Rationale
The exploration of unknown hazardous environments
has always attracted the scientific community. The common aspects of planetary
and space missions are cost and risk of manned missions. To reduce the
impact of such factors, space Agencies are focusing on unmanned and highly
automated missions.
Within the issue of exploring the planet Earth,
the Antarctic plateau has become of great interest in the last few decades.
The Antarctic is the most productive region of the whole planet for the
search of meteorites. The great number of findings is mostly due to its
polar desert environment, which preserves extraterrestrial material for
more than some hundred thousand years, and to the meteorite against ice
color-contrast which allows an easy spotting in the field. Even more importantly,
meteorites fallen on the ice cap are concentrated by ice dynamics in blue
ice fields, the so-called 'meteorite traps'. The discovery of the Antarctic
meteorite concentrations dates back to 1969, and since then more than 17,000
meteorite fragments have been recovered. This tremendous yield of extraterrestrial
material has provided the scientific community with new insights on the
origin and evolution of the Solar System, including planet Earth, Mars
and the Moon.
In such a context, scientific and technological
know-how of the partners involved in the present research program are joined
to tackle the issue of exploring Antarctica by means of autonomous rovers.
With respect to the previous version, the present
version of the project shows new features especially in the sense of clarifying
synergies with the ENEA project MORICO3, (principal investigator: Dr. Moriconi).
In fact, although the projects share some common features, their objectives
are somewhat different and more importantly, cooperation of the two autonomous
vehicles could make easier the achievement of both project targets. Specifically,
the following considerations apply:
-
The variety of tasks and functionality requested
for an autonomous vehicle working in Antarctica clearly show that cooperation
of a `large' rover (4-5 meters, 5-6 tons) like the MORICO3 vehicle with
a `small' rover (1-1.5 meters, 0.2-0.3 tons) like the one referred to in
this project , would allow to optimize the execution of the different specific
tasks (see subsection 7b.3).
The basic idea behind this project is to build
an autonomous rover executing a number of tasks within the range of some
kilometers around the base-station which may be either the base-camp or
the `large' rover MORICO3.
-
Testing of the various subsystems and possibly of
the whole rover could be performed jointly with the rover MORICO3 (in Norway,
December 2000-March 2001). This will allow to verify both functionality
of the single rovers and the cooperation strategies (localization, velocity
estimation, on line map building).
It is worth while to recall that the University
of Siena supported a pre-project (50 ML) during 1998, aimed to a preliminary
investigation on mobile robotics for Antarctica exploration and the design
of a pre-prototype (www-dii.ing.unisi.it/~ control/research/Antartide.html).
The rover supporting frame, moved by two independent caterpillars, is under
construction and should be completed by the end of next September.
6.2 Research design
This project deals with the exploration of Antarctica
by means of autonomous rovers. The exploration of the plateau can be made
by a single rover or a team of rovers. The typical scenario of an autonomous
exploration is as follows: the rovers cooperate in exploring the surface
using their sensor devices. A map is incrementally built, and measures
of data reliability are associated with it. The map is dynamically updated
through optimization procedures. Once the confidence intervals of data
are satisfactory, it is possible to place landmarks on the ground and to
collect meteorites samples with coring procedures. The rover should be
equipped not only with sensors for the localization of meteorites lying
on the plateau surface, or buried up to a certain depth, but also with
alarm sensors. While navigating on the plateau the probability of running
into crevasses is not disregardable. Thus to avoid accidents, the mobile
robot must be able to detect crevasses and other obstacles, e.g. ice hills,
by means of sensors.
Two possible scenarios are taken into account.
In the first one, the mobile robot executes its tasks in the neighbourhood
of the base camp within the range of some kilometers. In the second configuration,
the mobile robot cooperates with other rovers to perform its tasks: the
robot is taken to the area of interest by a robot of larger size, for instance
the robot MORICO3-ENEA, then, the robot starts to explore the area in the
neighbourhood of the robot MORICO3-ENEA and cooperates with it in acquiring
and processing multi-sensorial data.
Some of the functional capabilities of the single
rover and of the rover team are here reported:
-
Crevasse-warning
-
In this configuration the rover can serve as pilot
for snow-mobile convoys. Through RES (Radio Echo Sounding) and video measures
it will be able to detect obstacles, alarm the caravan and re-plan a new
path free from collisions. Such a function is necessary for wide-range
missions in Antarctica and becomes mandatory for cooperating rover tasks
(second scenario). The advantage of using a small and light robot as pilot
in the exploration task is apparent: the larger robot (e.g. the robot MORICO3),
following the pilot trajectory, navigates in safe mode and can recover
the light rover pilot in case of accidents.
-
Maps of meteorites
-
This application is mainly focused on the scientific
research on meteorites. It consists in collecting data on the presence
of meteorites on the surface of the plateau or buried in the ice. Beside
the possibility of sample recovery, the detection of meteorites buried
in the ice will provide 3D meteorite distribution maps. Such maps of meteorites
will allow sample recovery and reliable estimates of the fluxes of extra-terrestrial
material to Earth over time.
Although the rover should be able to independently
build meteorites maps, this function could be carried out in a framework
of cooperating rovers as well. Note that the cost of building a map with
given accuracy could be substantially reduced by using a team of rovers
to explore the area of interest. Moreover such a configuration would help
to reduce the energy consumption and the level of pollution: a two level
solution suggests to use the robot MORICO3 only for large trips (10 KM
and more) to transfer the 'small' rover to the areas of interest.
-
Ground stratigraphy
-
Palaeo-climatic reconstruction and climatic forecast
can be inferred by studying the ice stratification of the Antarctic plateau.
This research project deals with both the development of GPR techniques
(optimal filtering of data) and seismic reflection experiments. In this
case the two rovers cooperate: the smallest one brings the geophone receivers
around while rover MORICO3 generates pulses on the ground.
-
Maintenance
-
In order to reduce the risk of manned missions for
maintenance operations in case of hard atmospheric conditions, the mobile
robot, provided with a CCD camera, a laser finder and a simple robotic
manipulator, can be used to execute autonomous or teleoperated maintenance
procedures.
-
Robust localization and map building
-
This function is relevant to both the individual
and cooperating rovers scenarios. In order to improve the knowledge of
the environment, a team of robot can integrate their sensor capabilities
through procedures fusing sensor data coming from CCD cameras, GPS's, laser
finders and other sensor equipment. In particular, the small rover of the
present project and that of MORICO3 could interact to increase the estimation
accuracy of their positions and velocities.
The D.I.I. research group and that of Prof. Cipolla
at the Lab. of Robotics and Artificial Intelligence in Cambridge are jointly
working on artificial vision sensing. Specifically, researches on advanced
techniques for estimating the structure of the scene and the rover camera
motion relative to the scene through bidimensional images are in progress.
A joint researh with the LAAS-CNRS in Tolosa on
localization and map building techniques for unstructured environments
has also started up. A PhD student will spent one year at the LAAS-CNRS
with the group of Prof. Lacroix.
6.3 Objectives
The present research program focuses only on some
of the most important issues listed in the previous section. In particular,
the problems that will be addressed are those related to the research fields
of D.I.I. and D.S.T.. The product of the research is a mobile robot able
to work at temperatures lower than -20 degrees and characterized by the
following functional features:
-
self-localizazing with respect to a world frame through
procedures able to fuse sensor data; tracking pre-computed paths joining
the base camp and important targets for maintenance and research tasks;
-
detecting the presence of meteorites on the surface
or buried in the ice up to a certain depth and on board processing of sensor
data to detect meteorites and optimally adapt trajectories in order to
maximize information contained in the 3D maps of meteorites;
-
coring and collecting tools to pick up meteorites
lying on the plateau surface or buried up to some hundreds meters;
-
obstacle avoidance and alarm docking base procedures;
-
cooperation with other rovers to optimize problem
solving procedures.
The methodological investigation of the project will
focus on the following objectives:
-
Construction and adaptive updating of navigation
maps. This problem is usually approached starting from an initial and rough
workspace description which is dynamically refined and continuously updated
through sensor measurements collected during the mobile robot motion. Suitable
measures of map reliability are associated with the map. These are given
as probability distributions or hard bounds on the worst-case error. The
main goal consists in generating optimized algorithms for handling uncertainties
according to a deterministic approach. Reasearch on this topic is being
presently developed at the D.I.I. and will be further reinforced through
the recently started cooperation with the research group of Prof. Lacroix
at the LAAS-CNRS of Tolouse.
-
Dynamic vision and filtering in autonomous navigation.
The basic issue in this research area is to estimate the structure of the
scene and the camera motion relative to the scene through bidimensional
images. The specific goal pursued in this project is to study and test
algorithms for tracking moving object contours, finalized to solving typical
problems in autonomous navigation, such as adaptive obstacle recognition,
''time to contact'' estimation, etc..
-
Detection limit for masses buried in the ice by RES
investigations. Tests aiming at evaluating the RES detection limit for
masses buried within the ice have been carried out since Dec.'97. By using
test samples such as metallic bodies deep into shallow bores, tests proved
that the available RES techniques can detect meteorite-like masses of 1
kg at a depth of about 10m. In this project it is expected to improve the
RES detection limits (reducing the minimum mass detection limit; increasing
the depth of investigation) on an experimental basis.
6.4 Methodology
The project will be divided into the following three
stages to be carried out in two years (PEA 2000 and PEA 2001).
-
Description of the technological problems associated
with a rover for the autonomous exploration of Antarctica. Particular attention
will be devoted to the technological problems related to hard meteorological
conditions. Definition of the technical specifications of some parts of
the rover, like the engine, the sensors, the radar device for the localization
of meteorites and crevasses, the processing unit, the radio communication
device, and others.
-
Complete the mechanical base of the mobile robot
under construction at the Lab. of D.I.I., to be used as a prototype for
explorations in Antarctica-like environments. Design and build the electronic
components and the robot sensing. The main actions to be performed are:
-
Adapting the robot propulsion system to the Antarctica
environment.
-
Realizing a suitable thermal insulation and providing
a thermostatic control for all the parts of the robot which are sensitive
to a temperature below -20 celsius degrees.
-
Equipping the robot with all the sensors necessary
to perform the required operations, and in particular with a high sensitivity
radar device for the localization of meteorites and crevasses.
-
Providing devices for signal acquisition, conditioning
and real time data processing.
-
Equipping the robot with a radio link to the base
camp, other transmitting stations or rovers.
-
This last stage is devoted to designing and performing
experiments, in order to test the prototype.
6.5 International
cooperations
The problems concerning dynamic vision for autonomous
navigation will be investigated in collaboration with the Laboratory of
Robotics and Artificial Intelligence of the University of Cambridge, directed
by Prof. Roberto Cipolla. A scientific cooperation between this Laboratory
and the D.I.I. is under way, and will be further promoted in the context
of this research project. The study of advanced techniques for the construction
and updating of navigation maps in the presence of uncertainty will be
carried out in collaboration with the research group of Prof. Lacroix of
the LAAS-CNRS in Tolouse. As long as the techniques for the localization
and the extraction of the meteorites are concerned, the project will feature
the technical and scientific collaboration of the Laboratories CSNSM CNRS-Orsay,
France, which are currently involved in a similar research project, coordinated
by Prof. M. Maurette, Dr. M. Gounelle and Dr. G. Immel.
7 Bibliography
7.1 Robust estimation
and filtering: theory and algorithms
-
A. Garulli, A. Tesi and A. Vicino (eds.), Robustness
in Identification and Control, Springer-Verlag, 1999.
-
A. Garulli, A. Vicino and G. Zappa, 'Optimal induced-norm
and set membership state smoothing and filtering for linear systems with
bounded disturbances', Automatica, vol. 35, pp. 767-776, May 1999.
-
L. Chisci, A. Garulli and G. Zappa, 'Recursive state
bounding by parallelotopes', Automatica, vol. 32, pp.1049-1056, 1996.
-
A. Vicino and G. Zappa, 'Sequential approximation
of feasible parameter sets for identification with set membership uncertainty',
IEEE Transactions on Automatic Control, No. 6, pp. 774-785, June 1996.
7.2 Autonomous mobile
robot navigation
-
M. Di Marco, A. Garulli, D. Prattichizzo, A. Vicino,
'Constructing and updating navigation maps with uncertainty', submitted
to 38-th IEEE Conf. on Decision and Control, Phoenix, 1999.
-
A. Garulli and A. Vicino, 'Uncertainty sets for dynamic
localization of mobile robots', submitted to 38-th IEEE Conf. on Decision
and Control, Phoenix, 1999.
-
G. Fusai and A. Vicino, 'Costruzione e aggiornamento
di mappe di avigazione', Tech. Rep., Dipartimento di Ingegneria dell'Informazione,
Universita' di Siena, 1998.
-
I. Palmas, A. Vicino, 'Costruzione ed aggiornamento
di mappe di navigazione per robot mobili tramite triangolazioni', Tech.
Rep., Dipartimento di Ingegneria dell'Informazione, Universita' di Siena,
1997.
-
S. Betge'-Bresetz, P. Hebert, R. Chatila, M. Devy,
'Uncertain map making in natural environments', Proc. IEEE Int. Conf. on
Robotics and Automation, pp. 1048-1053, 1996.
7.3 Control of robotic
manipulators
-
D. Prattichizzo and A.Bicchi, 'Dynamic analysis of
mobility and graspability of general manipulation systems', IEEE Transactions
on Robotics and Automation, 14(2), April 1998.
-
D. Prattichizzo, P. Mercorelli, A. Bicchi, and A.
Vicino, 'Geometric control techniques for manipulation systems', in Proc.
IFAC Conference on Control of Industrial Systems, Belfort, France, May
1997 in Invited Session on Control of robotics systems.
-
D. Prattichizzo, P. Mercorelli, A. Bicchi, and A.
Vicino, 'On the decoupling and output functional controllability of robotic
manipulation', in Proc. IFAC Symposium on Robot Control, Nantes, France,
September 1997.
-
D. Prattichizzo, P. Mercorelli, A. Bicchi, and A.
Vicino, 'On the geometric control of internal forces in power grasps',
in Proceedings 36th IEEE International Conference on Decision and Control,
San Diego, California, 1997.
-
D. Prattichizzo, P. Mercorelli, A. Bicchi, and A.
Vicino, 'Active suspensions decoupling by algebraic feedback', in Proc.
of the the 6th IEEE Mediterranean Conf. on Control and Systems, Sardinia,
Italy, June 1998.
-
D. Prattichizzo, P. Mercorelli, A. Bicchi, and A.
Vicino, 'Geometric disturbance decoupling control of vehicles with active
suspensions', in Proc. IEEE Int. Conf. on Control Applications, 1998.
-
D. Prattichizzo, P. Mercorelli, and A. Vicino, 'Robust
decoupling control of contact forces in robotic manipulation', in Proc.
of 2nd IFAC Symposium on Robust Control Design, Budapest, Ungary, June
1997.
-
D. Prattichizzo, J. Salisbury, and A. Bicchi, 'Contact
and grasp robustness measures: Analysis and experiments', in O.Khatib and
J. Salisbury, editors, Experimental Robotics IV, Lecture Notes in Control
and Information Sciences 223, pages 83-90, Springer Verlag London, 1997.
7.4 Dynamic vision
-
A. Garulli, D. Prattichizzo, A. Vicino, 'A set theoretic
approach for time to contact estimation in dynamic vision', 37-th IEEE
Conf. on Decision and Control, Tampa, December 1998.
-
A. Garulli, D. Prattichizzo, A. Vicino and G. Zappa,
'Uncertainty interval evaluation for time-to-contact estimation problems',
Proc. 3rd IFAC Symposium on Intelligent Autonomous Vehicles, Madrid, March
25-27, 1998.
-
G. Chesi, E. Malis and R. Cipolla, 'Collineation
estimation from two unmatched views of an unknown planar contour for visual
servoing', Tech. Report, University ofCambridge, 1999.
-
R. Cipolla, Active Visual Inference of Surface Shape,
Lecture Notes in Computer Science, Springer-Verlag, 1995.
-
S. Maybank, Theory of Reconstruction from Image Motion,
volume 28 of Information Sciences Series, Springer Verlag, 1992.
-
A. Blake and A. Yuille, Eds., Active Vision, MIT
Press: Cambridge, MA, 1992.
-
Y. Bar-Shalom and T. E. Fortmann, Tracking and Data
Association, Academic Press, 1988.
7.5 Meteorites
-
N. Perchiazzi, M. Mellini, 'Revisione e riclassificazione
della collezione di meteoriti del Museo di Storia Naturale dell' Universita
di Pisa', Atti Soc. Tosc. Sc. Nat., 1996.
-
L. Folco, M. Mellini, 'Crystalchemistry of meteoritic
kirschsteinite', European J. Mineralogy 9, 969-973, 1997.
-
L. Folco, M. Mellini, C. T. Pillinger, 'Equilibrated
ordinary chondrites: constraints for thermal history from iron-magnesium
ordering in orthopyroxene', Meteoritics and Planetary Science, 32, 567-575,
1997.
-
M. Mellini, 'The need for electron crystallography
in mineral sciences. In 'Electron Crystallography', (ed. Dorset ) Kluwer
Academy Press, 1997.
-
W. Cassidy, R. Harvey, J. Shutt, G. Delisle and K.
Yanai, 'The meteorite collection sites of Antarctica', Meteoritics 27,
490-525, 1992.
-
N. Perchiazzi, L. Folco, M. Mellini (1999), 'Volcanic
ash bands in the Frontier Mountain and Lichen Hills blue-ice fields, northern
Victoria Land", Antarctic Science
-
A. Capra, M. Chiappini, L. Folco, M. Frezzotti, M.
Mellini, I. Tabacco (1999), 'La trappola per meteoriti di Frontier Mountain
(Terra Vittoria settentrionale): morfologia del basamento roccioso, flussi
del ghiaccio e velocita' di ablazione. Convegno Naz. Glaciologia Antartica
e Paleoclima, Padova.
-
L. Folco, M. Mellini (1999), 'Meteoriti antartiche:
un bilancio di quattro spedizioni e programmi per il futuro', Convegno
Naz. Glaciologia Antartica e Paleoclima, Padova.